又是一年年末,今年干了许多事情呢,感觉比高三还长(奇怪,按理说时间应该过得越来越快才对,今年怎么感觉好长)
2025 这一年我的技术水平突飞猛进了,学到的东西感觉比之前 18 年加起来还多(或许是因为之前学的东西都被默认为常识了所以感觉没那么多(?),这就是技术爆炸吗?
先来一张 GitHub contributions 图吧,今年怎么这么活跃。

本年度是我参与多人协作开发项目的第一年,以往都只是自己一个人开发,没有什么协作经验。多人协作项目确实让我学到了很多东西,我认为这方面是很重要的,一个人开发项目是不可能长久的,但是一群人开发一个项目就动力十足啊。
年度项目
桌面宠物(寒假~3月初)
我的第一个正式硬件项目,自己设计 PCB 板 + 自己焊接 + 自己写代码
半成品成品见我的 B 站

一笔带过好了,也没做得很满意。
神秘的微信小程序(3月初~5月底)
虽然总说小程序很吃屎(确实非常吃屎啊,遇到一个不给钱还老改需求的 甲方),学到了许多东西确实是真的,认识了许多大佬,积累了许多开发经验(怎么感觉在说废话)
这个项目我不想多提(提多了都是泪),仓库还是 private 的(我想给它 public 了)
机创物流赛(六月初~8月初)
不要给反馈加低通滤波——一位不愿意透露姓名的网友
物流赛的两个月是能力提升最大的两个月,虽然也是作息彻底乱掉的开端(
虽然最后并没有好的结果(气死我了真是,就差一点点,但凡再多一天)但是也收获了许多调试经验,测试了之前的很多想法(算是奠定了现在使用的项目结构的基础吧)
现在想来还是觉得我们物流赛打的很牛逼,五个基本没有经验的大一学生,21 天从画图到调试搓了一台车(至于为什么只有 21 天,答案是经验不足之前的一二代车都有巨大问题),时间实在太紧,我又犯了个错误浪费两天(妈的要不是那个鸟人说 120 Hz 频率太低我 TM 怎么会被误导那么久),最后差一点点进国,只要能进国必然是国一。
哎,非常可惜。
物流赛的代码由于时间太紧写的不如 shi,所以没有传。
Robocon 2026(9 月初 ~ 今)
今年的备赛过程中做了很多创新,包括

搭了一堆的基建(今年能给小灯留下很多资料),最主要的是建立了战队官方 org: https://github.com/HITSZ-WTRobot
开发的基建包括:
统一电机驱动仓库:https://github.com/HITSZ-WTRobot/motor_drivers
暂时使用 C 语言开发(我究竟是怎么开始手搓 vtable 的)
统一底盘控制仓库:https://github.com/HITSZ-WTRobot/chassis_controller
实现了许多神奇的功能,可惜现在边走边转不太完善
S 形速度曲线规划库:https://github.com/HITSZ-WTRobot/s-curve-planner
一维规划,可以设置:初位置 $x_s$,初速度 $v_s$,初加速度 $a_s$,末位置 $x_e$,最大速度 $v_m$,最大加速度 $a_m$,最大加加速度 $j_m$。末速度和末加速度为零。
可以在运动过程中通过当前参数修改目标位置并平滑衔接。
一些工具:
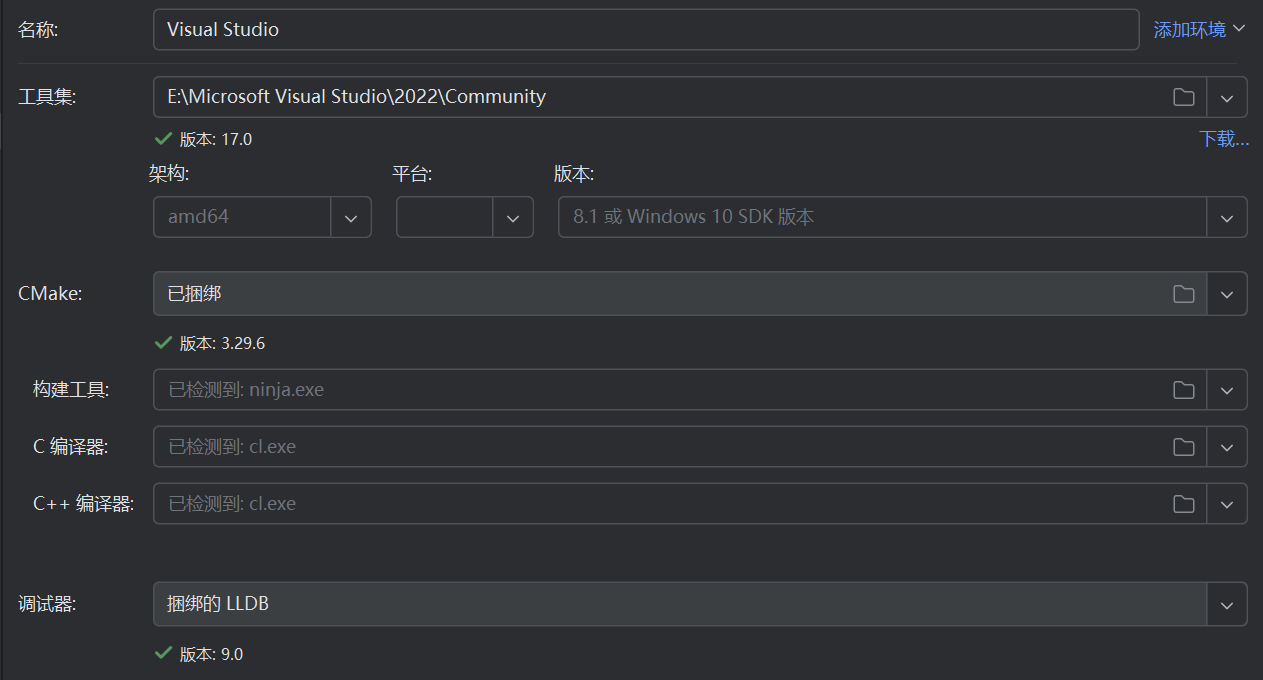
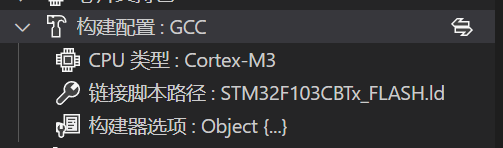
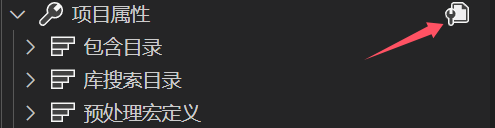
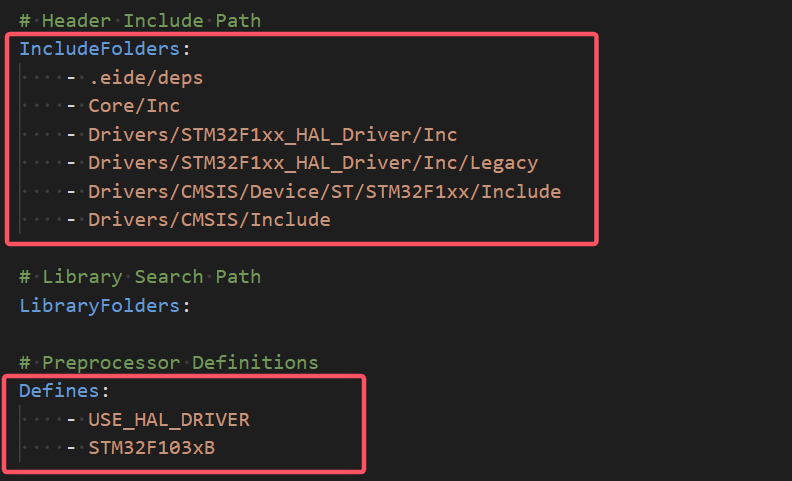
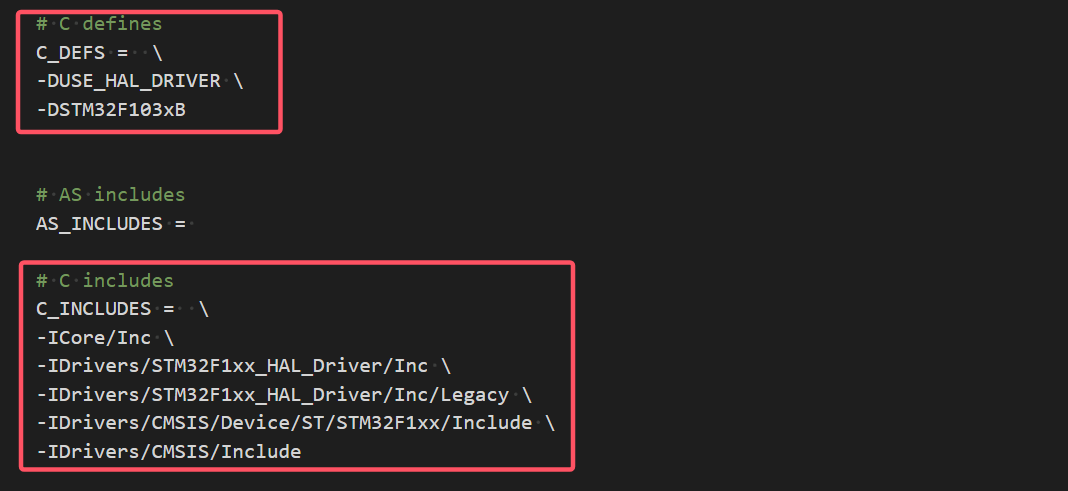
STM32 妙妙小工具(基于 STM32CubeMX):https://github.com/HITSZ-WTRobot/stm32tool
可以快速创建 STM32 项目并进行一定初始化,同时可以将一部分操作移动到 shell 执行
带有 STM32CubeMX 和 stm32tool 的 docker 容器,用于自动化构建:https://github.com/syhanjin/stm32cubemx-docker
一个基于 cmake 的模块化架构尝试:https://github.com/HITSZ-WTRobot/template-with-build-check
别的项目
blossom 朝华重构尝试
这个项目又㕛叒叕被搁置了,使用 Rust(Rocket) + PostgreSQL + Minio 搭了个基建又没消息了,但是也算是提供了一些 Rocket 开发的经验
充电宝项目
🤔 没成功,两块板子四个芯片焊出了 4 个不同的问题,没辙
hoa & Astro 重构
因为精力不足 + 私人原因(前半段是精力不足现在是私人原因)只开发了前半段就跑路了。简单搭建了基本框架,基于之前 Origami404 写的元数据,进一步讨论构建了现有的元数据内容。
后面就没写了。
现在开发结果可以在 https://next.hoa.moe 看到
年度总结
怎么感觉今年就没停下来过,各个项目无缝衔接,挺爽的。不过持续工作太久现在精神不是很正常啊,感觉我要精神飞升了。过年的时候还是要好好休息才行。
好像没什么可写的了,怎么感觉过去的记忆都模糊了(?估计是最近事情太多了吧,也许我过年的时候还会再写一个。
新年展望
先看看去年写的实现了多少
- ❓看看能不能混一个保研资格
- ❎大一立项拿个一等奖
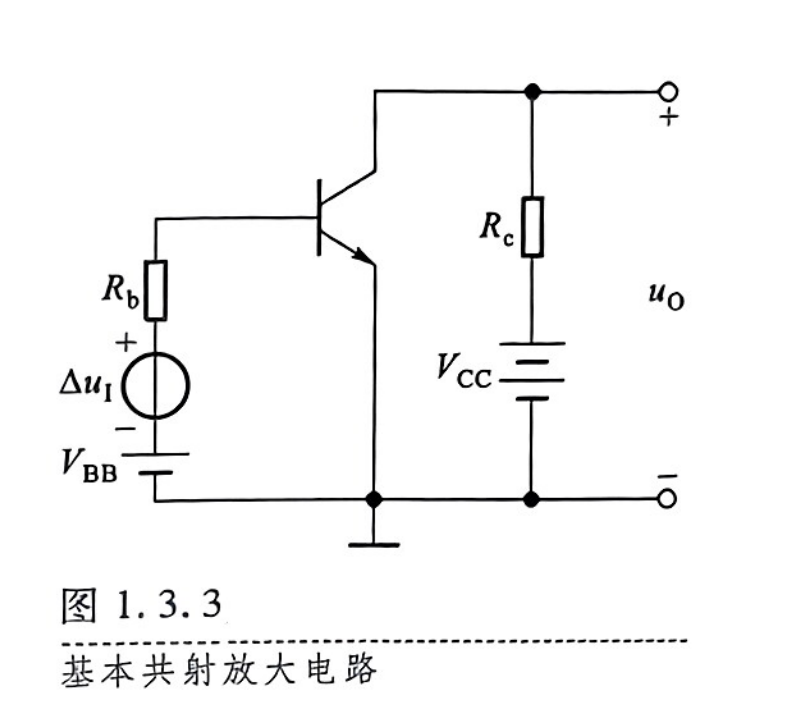
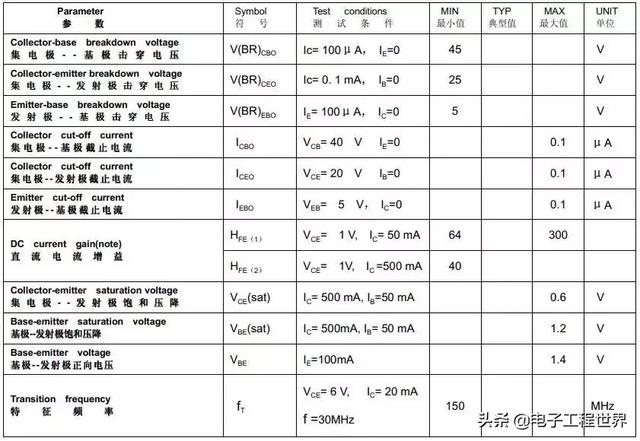
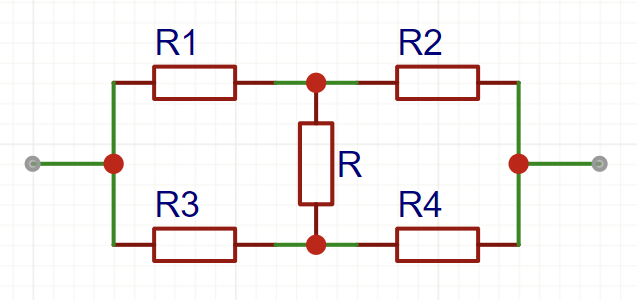
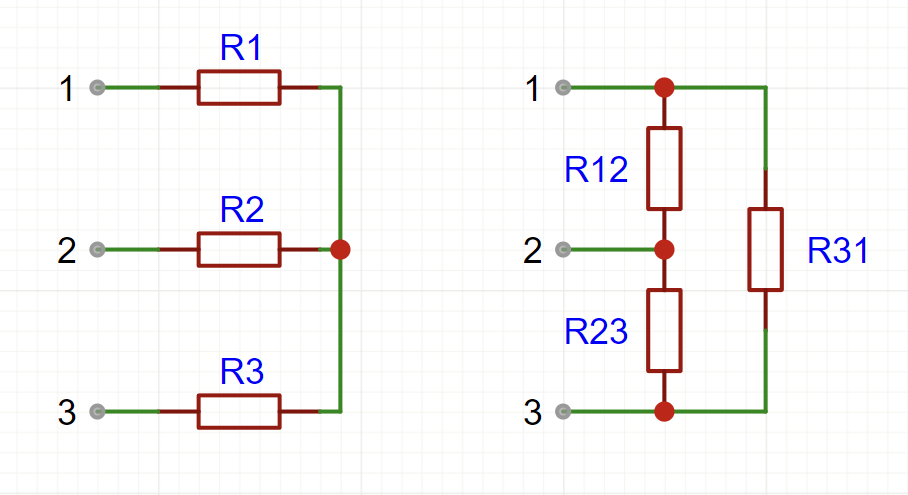
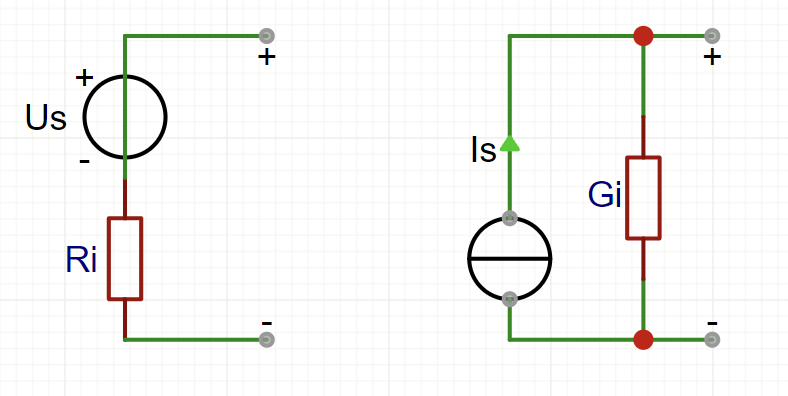
- ✅入门三电
- ✅熟悉
FreeRTOSROS- ❎瞅瞅能不能参与 25 年 RC 正赛 + ✅好好打 26 年 RC 正赛
- ✅小狗桌宠完工 + ❎量产版完工
- ✅下学期少混一点,多学点东西
- ❎
结束单身开玩笑的✅活着就行- ❎见到某人结婚(有难度)
- [ ] Robocon 2026 取得好成绩(最好是国一喵)
- [ ] 再弄一个好玩的项目(有想法欢迎找我合作喵)
- [ ] 学分绩不要 --(严格来说是老师捞捞我不要让我马原挂了啊)
- [ ] 治安管理处罚法删去有关吸毒记录封存相关内容或者吸毒入刑
- [ ] 活着