
本文基于
STM32F103CBT6和TB6612驱动芯片驱动趣轮科技MG513P30_12V直流电机,并使用 PID 算法进行闭环控制
直流电机驱动
驱动芯片
具体芯片使用请看 这篇
驱动代码
驱动代码要讲的部分不多,注释里已经基本全了,Motor_SetSpeed 之所以输入范围是 $[-1, 1]$ 是对齐 PID 控制的输出
默认将 STBY 引脚直接接入 3.3v 所以不需要使能 / 失能函数
1 | /** |
1 | /** |
Motor_t 类型变量定义示例
1 | Motor_t motor = { |
PID 控制
理论基础 / 参考资料
- SSC 的 PID 控制资料 - 不可共享
- (三) PID控制中的噪声过滤
- 史上最详细的PID教程——理解PID原理及优化算法
- PID控制器开发笔记之十二:模糊PID控制器的实现
实践开始
要完成 PID 控制,我们需要有反馈输入 feedback,并拥有预设定的目标值 target,然后根据 PID 算法计算输出 output
首先,我们假定
- 输入范围不限,因为 PID 的输入可能是 圈数、速度 等很多东西
- 输出有效范围在 $[0,1]$,因为我们的 PID 输出应当作为电机控制的输入(在上面的电机控制驱动中指的是
Motor_SetSpeed函数的输入)
由一大坨理论(从 SSC 的 PID 控制教程中)得到增量式 PID 计算公式
$$\Delta u(n) = u(n) - u(n-1) = K_P(e(n)-e(n-1)) + K_I e(n) + K_D(e(n)-2e(n-1)+e(n-2)) $$
可见增量 $\Delta u(n)$ 只与最近三次误差值有关,故我们只需记录最近三个误差值 error, error_last1, error_last2
注意:PID 计算函数应当是周期性的,因为单片机中使用的是离散型 PID 系统
离散 PID 系统存在控制频率要求,实际使用时需要在硬件定时器中使用,周期越小,要求系统抗噪声能力较强,同时参数值较小
根据上面一坨东西,我们可以得到初步的 PID 计算函数
1 | float PID_Calculate(PID_t* hpid, const float feedback) |
但是很快我们会发现一些奇奇怪怪的问题,比如
- 我在设置目标值时系统一下子就跑飞了,油门轰轰地响,半天停不下来,都要开到华盛顿去了
- 怎么输出老是在目标附近摇摆不定做类简谐运动,让我回忆起我美好的高中生活
- 速度环为啥老是波动不能固定?这个位置环到位了能不能就别动来动去了
- 它怎么总是先飞过去再飞回来
- 臣卜木曹为啥它做简谐运动振幅还越来越大,我草要飞了!
- 我趣它为啥非要先反着转然后再正着转过去?
显然,我们需要一定的优化,比如
-
限制输出范围,或者叫抗饱和
将
output的值限制在有效范围内,避免一直处于超调区,系统能够更快响应1
2
3
4
5/* 抗饱和:限制范围,防止跑飞,同时限制速度 */
if (hpid->output > hpid->output_abs_max)
hpid->output = hpid->output_abs_max;
else if (hpid->output < -hpid->output_abs_max)
hpid->output = -hpid->output_abs_max; -
加一些低通滤波器器,避免高频噪声(同时也避免系统输出剧烈变化)
1
2
3
4
5// 对微分部分进行低通滤波
hpid->filtered_d = hpid->filtered_d * dfilter + d * (1 - dfilter);
// 对输出进行低通滤波
hpid->output += du * (1 - ufilter); -
对积分部分添加死区
通常在非常接近目标值时输出的波动都是由积分部分引起的,如果所谓的「非常接近」已经达到精度需求,则完全可以在这一精度范围内舍弃微分部分以避免波动
1
2float i = 0;
if (hpid->error > hpid->ideadzone || hpid->error < -hpid->ideadzone) i = Ki * hpid->error; -
使用模糊 PID 控制
往往一组 PID 参数不能满足动态过程的所有需求,所以就有了动态改变 PID 参数的模糊 PID 算法。
由于我还不会模糊 PID 控制,故采用下位方案:将控制过程分为两部分,以 $|error|$ 作为分界值 $cutoff$,使用两组不同的 PID 参数。这两组参数应当分别具有以下特性
- 初始参数应当让响应速度尽可能快,以缩短调节时间
- 末尾参数应当尽可能将系统控制在目标附近,以获得更高精度
1
2
3
4
5float Kp, Ki, Kd, ufilter, dfilter;
if (hpid->error < hpid->cutoff && hpid->error > -hpid->cutoff)
Kp = hpid->KpE, Ki = hpid->KiE, Kd = hpid->KdE, ufilter = hpid->ufilterE, dfilter = hpid->dfilterE;
else
Kp = hpid->KpS, Ki = hpid->KiS, Kd = hpid->KdS, ufilter = hpid->ufilterS, dfilter = hpid->dfilterS;
另外,对于以上几个奇怪的问题的原因,可能要从参数入手
注意:以下参数方面的原因判断不一定准确,建议自己调试总结
- 类简谐运动大概是由于积分部分和微分部分的超调,加大比例部分参数压住即可(或者减小积分部分)
- 先反转可能是微分部分设大了,减小微分部分参数即可
速度环的波动是正常的,因为即使一直给电机供一样的电,电机的速度也会发生变化,速度环在一定范围内的波动是正常的。
驱动代码
1 | /** |
1 | /** |
使用电机驱动和 PID 控制驱动
CubeMX 配置
时钟
HLCK 配置为 72 MHz
TIM1:预分配 72-1,自动重装载 10000-1。提供间隔 10ms 的定时中断
TIM2/TIM3:Combined Channels 配置为 Encoder Mode,并将 Encoder Mode 改为 Encoder Mode TI1 and TI2,其余默认
TIM4:预分频 72-1,自动重装载值 1000-1,并选择两个通道设为 PWM Generation 这里选择 CH1 和 CH2
记的打开定时器的中断
引脚
需要四个引脚,分别具有用户标签 MOTORA_IN1 MOTORA_IN2 MOTORB_IN1 MOTORB_IN2,即两个电机的四个输入
必要代码实现
-
定义
Motor_t类型变量和PID_t类型变量1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16Motor_t motors[2] = {
{
{&htim4, TIM_CHANNEL_1}, ///< PWM信号 {定时器, 通道}
&htim2, ///< 编码器使用的定时器
{MOTORA_IN1_GPIO_Port, MOTORA_IN1_Pin}, ///< 电机输入IN1 {GPIOx, Pin}
{MOTORA_IN2_GPIO_Port, MOTORA_IN2_Pin}, ///< 电机输入IN2 {GPIOx, Pin}
0, 0, 0, 0 ///< 方向,速度(0~1),编码器测得的速度,编码器测得的圈数
}, {
{&htim4, TIM_CHANNEL_2}, ///< PWM信号 {定时器, 通道}
&htim3, ///< 编码器使用的定时器
{MOTORB_IN1_GPIO_Port, MOTORB_IN1_Pin}, ///< 电机输入IN1 {GPIOx, Pin}
{MOTORB_IN2_GPIO_Port, MOTORB_IN2_Pin}, ///< 电机输入IN2 {GPIOx, Pin}
0, 0, 0, 0 ///< 方向,速度(0~1),编码器测得的速度,编码器测得的圈数
}
};
PID_t PIDs[2]; -
在
HAL_TIM_PeriodElapsedCallback回调中处理编码器数据并执行 PID 计算1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef* htim)
{
if (htim == &htim1)
{
/* 编码器采样 */
Encoder_Progress(motors + 0);
Encoder_Progress(motors + 1);
/* PID计算 速度环 */
if (PIDs[0].enable)
{
float pid_output = PID_Calculate(PIDs + 0, motors[0].real_speed);
Motor_SetSpeed(motors + 0, pid_output);
}
if (PIDs[1].enable)
{
float pid_output = PID_Calculate(PIDs + 1, motors[1].real_speed);
Motor_SetSpeed(motors + 1, pid_output);
}
}
}此处执行的是速度环控制,如果想要使用位置环,你只需要换一套参数,并将
feedback的实参改为motors[x].real_round即可 -
在
USER CODE BEGIN 2中进行 PID 参数初始化(具体参数自己调去),并使能TIM1的定时器中断1
2
3
4
5
6
7
8
9
10
11
12PID_Init(&PIDs[0],
, , , , ,
, , , , , ,
, ,
);
PID_Init(&PIDs[1],
, , , , ,
, , , , , ,
, ,
);
HAL_TIM_Base_Start_IT(&htim1); -
在恰当的地方使能编码器和电机
1
2
3
4
5
6
7Motor_Start(motors + 0);
Encoder_Start(motors + 0);
PIDs[0].enable = 1;
Motor_Start(motors + 1);
Encoder_Start(motors + 1);
PIDs[1].enable = 1;
注意事项
- 电机在 Start 之前或 Stop 之后处于断电状态,如果你希望就让那个电机保持在那里,你应当使用速度环控制并将目标设定为
0(或者使用位置环控制,并让电机位于目标值)- 不要试图自己调用
Motor_SetSpeed来设置速度,这是一个愚蠢的选择,因为这相当于完全舍弃了 PID 控制,正确的做法是修改 PID 控制的目标值,让 PID 来帮你实现
控制模式切换
「那我要是 TM 的既想要速度环又想要位置环怎么办?」 会有人这样想的
所以我们可以通过一些方法来实现两种控制的切换
-
定义一个集成类
1
2
3
4
5
6
7
8
9
10
11
12
13typedef enum
{
SPEED_LOOP = 0U,
POSITION_LOOP = 1U,
} WheelState_t;
typedef struct
{
Motor_t motor; ///< 电机类
PID_t speed_loop, position_loop; ///< 速度环pid和位置环pid
WheelState_t state; ///< 处于哪种控制模式下
uint8_t enable; ///< 是否开启
} Wheel_t; -
计算的时候稍费些功夫
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18/* PID计算 速度环 & 位置环 */
float pid_output;
if (wheels[0].enable)
{
if (wheels[0].state == SPEED_LOOP)
pid_output = PID_Calculate(&wheels[0].speed_loop, wheels[0].motor.real_speed);
else // wheels[0].state == POSITION_LOOP
pid_output = PID_Calculate(&wheels[0].position_loop, wheels[0].motor.real_round);
Motor_SetSpeed(&wheels[0].motor, pid_output);
}
if (wheels[1].enable)
{
if (wheels[1].state == SPEED_LOOP)
pid_output = PID_Calculate(&wheels[1].speed_loop, wheels[1].motor.real_speed);
else // wheels[1].state == POSITION_LOOP
pid_output = PID_Calculate(&wheels[1].position_loop, wheels[1].motor.real_round);
Motor_SetSpeed(&wheels[1].motor, pid_output);
} -
然后编写一个控制状态切换函数
1
2
3
4
5
6
7
8
9
10
11
12
13
14void switchWheelState(Wheel_t* wheel, WheelState_t newState)
{
if (wheel->state == newState) return;
wheel->state = newState;
switch (newState)
{
case SPEED_LOOP:
wheel->speed_loop.output = wheel->position_loop.output;
break;
case POSITION_LOOP:
wheel->position_loop.output = wheel->speed_loop.output;
break;
}
} -
如果你在切到位置环的时候不知道速度环到底把电机转到哪了
你还可以使用之前在
pid.h中挖下的一个坑来归零1
2
3
4
5
6
7
8
9
10
11
12/**
* @brief 重置PID过程量
* @note added 0.3.2
* @param __PID_HANDLE__
*/
你可以随时切换两种控制方式,获得更自由的控制体验
使用 VOFA+ 提供舒适的 PID 调参体验
显然,在代码里修改 PID 参数再重新烧录的调参方式是非常繁琐且低效的,我们需要一个更妙的调参方式,所以想到了 VOFA+ 辅助调参,调参过程中我们默认只对一个电机调参。
代码配置
-
对
prinft输出进行重定向1
2
3
4
5
6/* printf retarget */
int __io_putchar(int ch)
{
HAL_UART_Transmit(&huart1, (uint8_t*)&ch, 1, 0xFFFF);
return ch;
} -
向 VOFA+ 发送当前系统的状态
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
// delay_counter 的作用是在 PID 禁用后仍发送一些数据,带来更好的 VOFA+ 前端体验
if (PIDs[0].enable || delay_counter)
{
printf("%f,%f,%f,%f\n", motors[0].real_round, motors[0].real_speed, PIDs[0].output, PIDs[0].target);
delay_counter--;
}
HAL_Delay(20);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */ -
能够接受 VOFA+ 发送的指令
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58void HAL_UART_RxCpltCallback(UART_HandleTypeDef* huart)
{
if (huart == &huart1)
{
/* 校验协议头和协议尾 */
if (rb[0] == 0xAA && rb[6] == 0xBB)
{
switch (rb[1])
{
case 0x11: // 设置目标值
PIDs[0].target = *(float*)(rb + 2);
break;
case 0x22: // 启动电机
Motor_Start(motors);
Encoder_Start(motors);
PIDs[0].enable = 1;
break;
case 0x33: // 关闭电机,注意此时我们保证编码器开启,以持续记录电机位置
Motor_Stop(motors);
PIDs[0].enable = 0;
PIDs[0].output = 0;
delay_counter = 10;
break;
case 0x44: // 修改比例系数
PIDs[0].KpS = *(float*)(rb + 2)
/ MAX_SPEED
;
break;
case 0x55: // 修改积分系数
PIDs[0].KiS = *(float*)(rb + 2)
/ MAX_SPEED
;
break;
case 0x66: // 修改微分系数
PIDs[0].KdS = *(float*)(rb + 2)
/ MAX_SPEED
;
break;
case 0x77: // 修改微分低通滤波系数
PIDs[0].dfilterS = *(float*)(rb + 2);
break;
case 0x99: // 修改输出值低通滤波系数
PIDs[0].ufilterS = *(float*)(rb + 2);
break;
default: ;
}
printf("ACK: %f,%f,%f,%f,%f,%f\n",
PIDs[0].target, PIDs[0].KpS, PIDs[0].KiS, PIDs[0].KdS, PIDs[0].dfilterS, PIDs[0].ufilterS);
}
UART_Start_Receive_IT(&huart1, rb, 7);
}
}注意
-
这里调试的都是开始的 PID 参数,如果想要调试末尾的 PID 参数,请将后缀
S改为E -
在位置环调试模式下之所以
/ MAX_SPEED是因为电机的速度范围为 $[-366, 366]$,而 PID 输出范围为 $[-1, 1]$,需要对齐阶数
-
-
记得在
main函数里开启第一次接收
VOFA+ 配置
-
在 VOFA+ 里新建一个命令组,添加一些命令
Start:HexAA 22 FF FF FF FF BBStop:HexAA 33 FF FF FF FF BBSetTarget:HexAA 11 %% BB...
-
先进行一次烧录,让 VOFA+ 收到第一组数据(FireWater),并配置四个通道

在左侧拖出波形图
和一堆滑动条
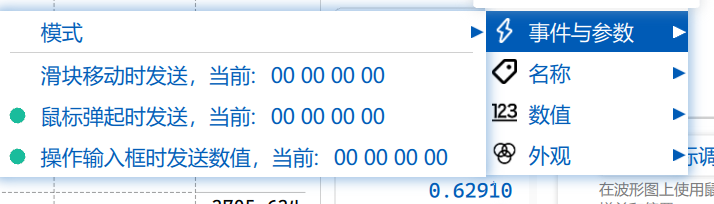
右键滑动条并绑定命令

将事件触发改为
-
其实就差不多了,剩下的还是得自己摸索
项目地址
调参项目发到了 GitHub,不完善,需要者自取